1
State Key Laboratory of Remote Sensing Science, Institute of Remote Sensing and Digital Earth Chinese Academy of Sciences, No.20, Datun Road, Chaoyang District, Beijing 100101, China
2
Zhejiang-CAS Application Center for Geoinformatics, No.568, Jinyang East Road, Jiashan 314100, China
*
Author to whom correspondence should be addressed.
Academic Editors: Pablo J. Zarco-Tejada, Arko Lucieer, Janet Nichol and Prasad S. Thenkabail
Received: 31 October 2014 / Accepted: 12 January 2015 / Published: 19 January 2015
(This article belongs to the Special Issue UAV-Based Remote Sensing Methods for Modeling, Mapping, and Monitoring Vegetation and Agricultural Crops)
Abstract
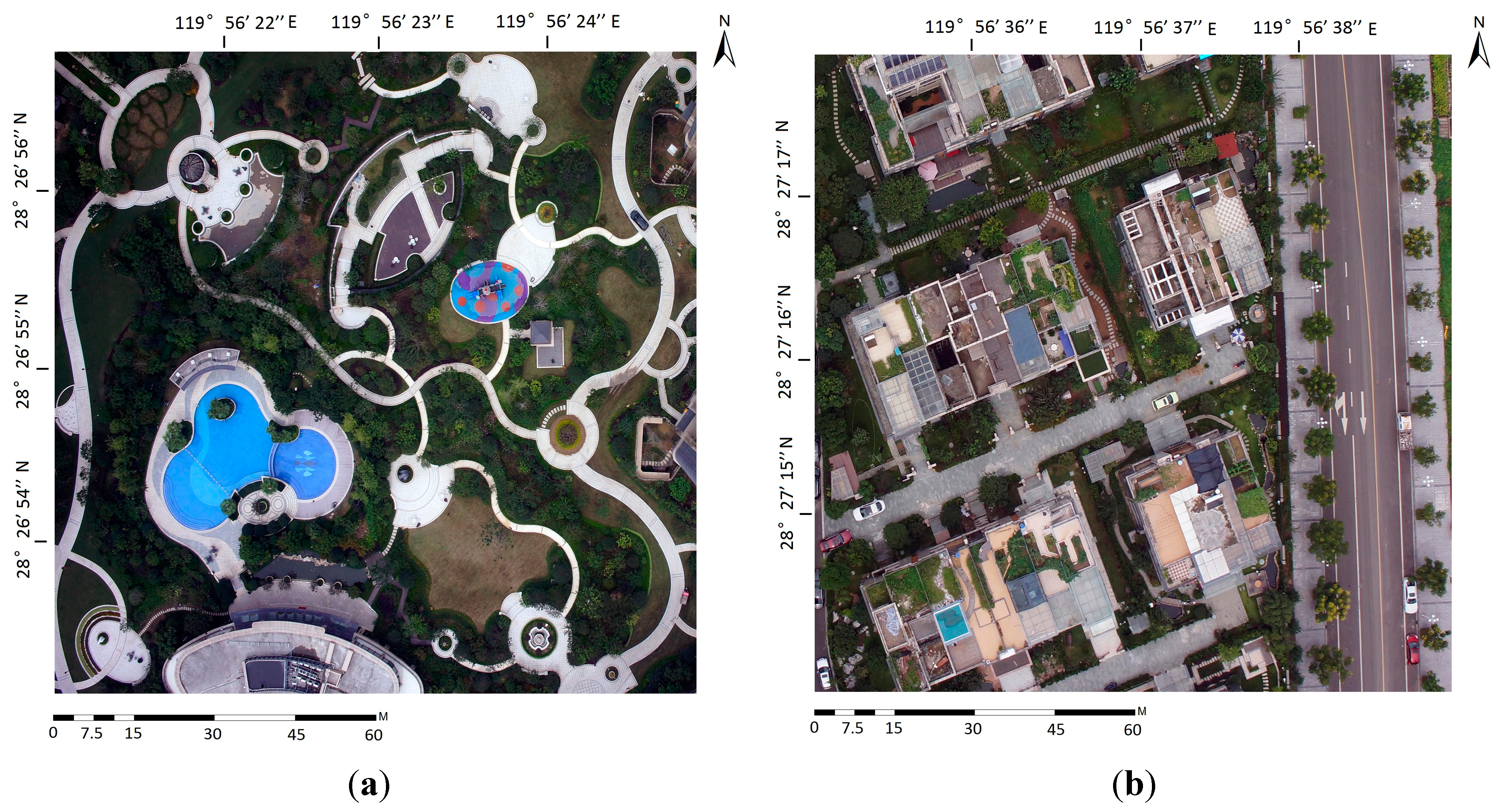
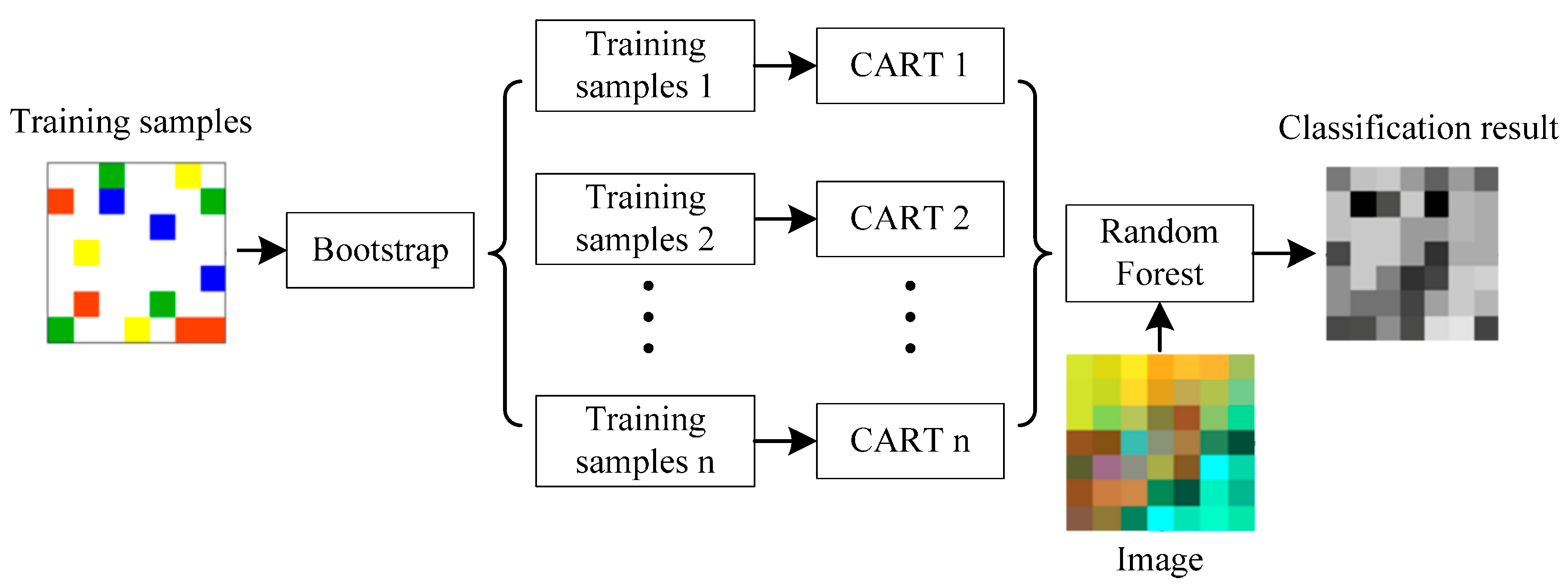
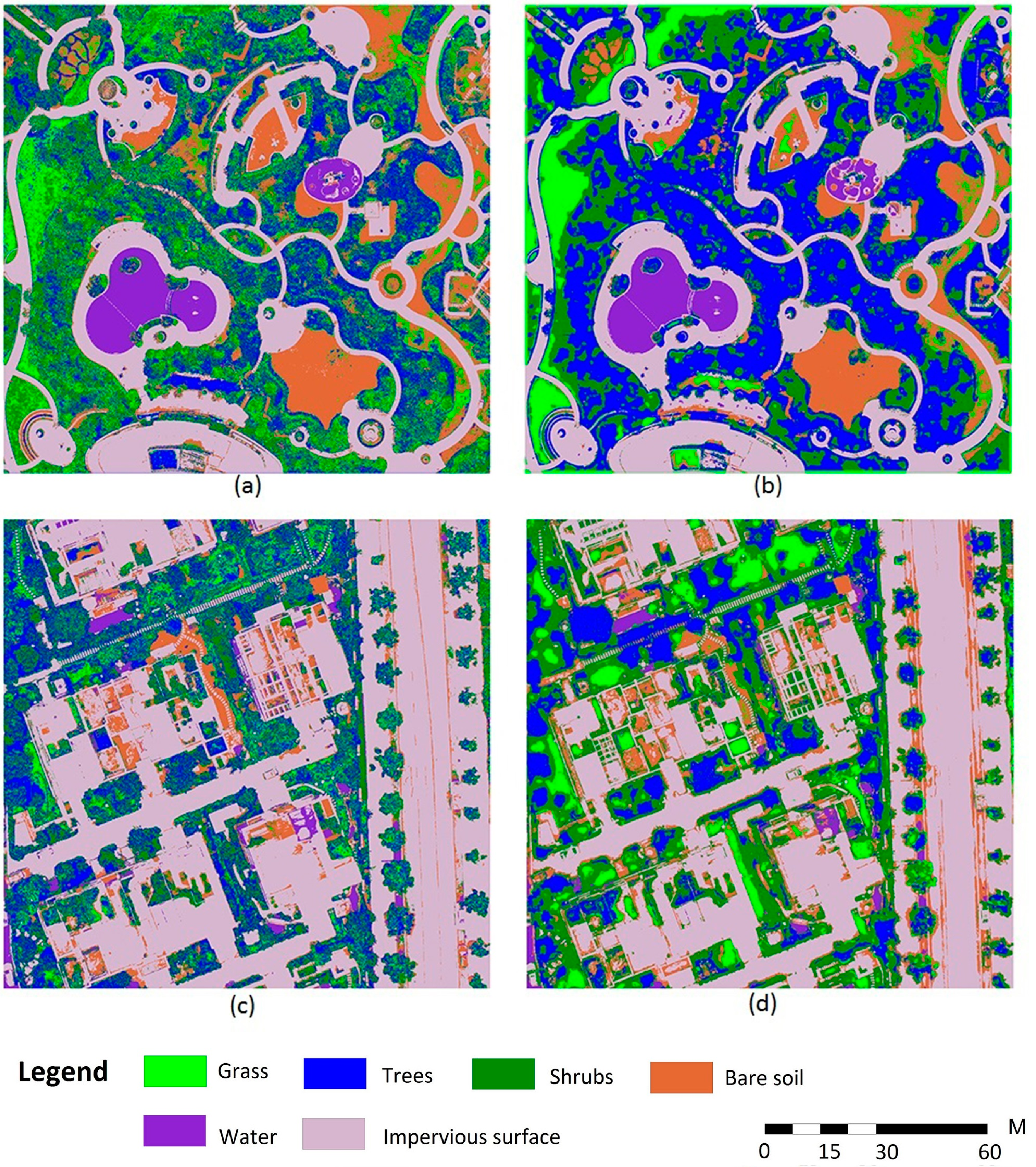
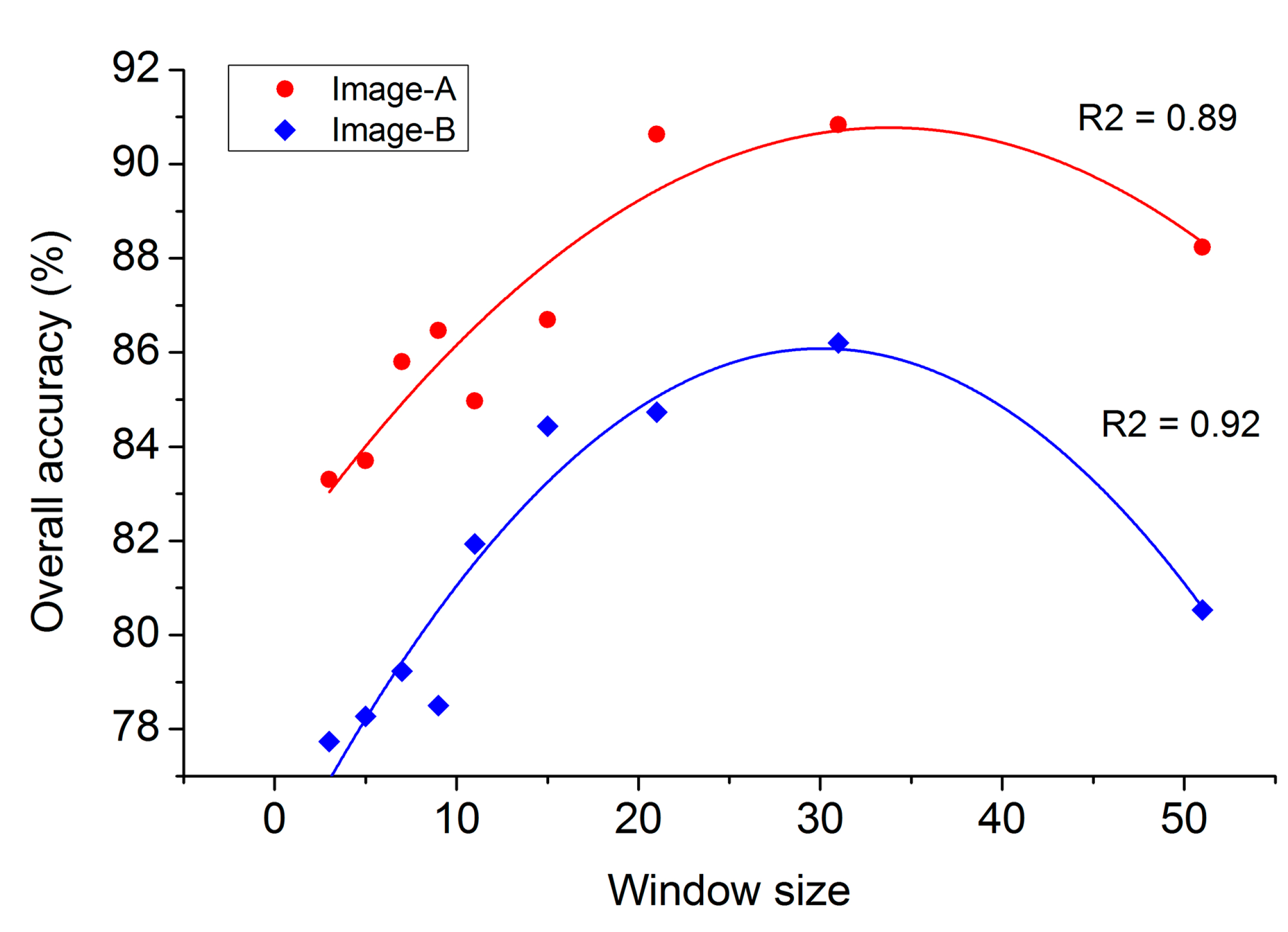
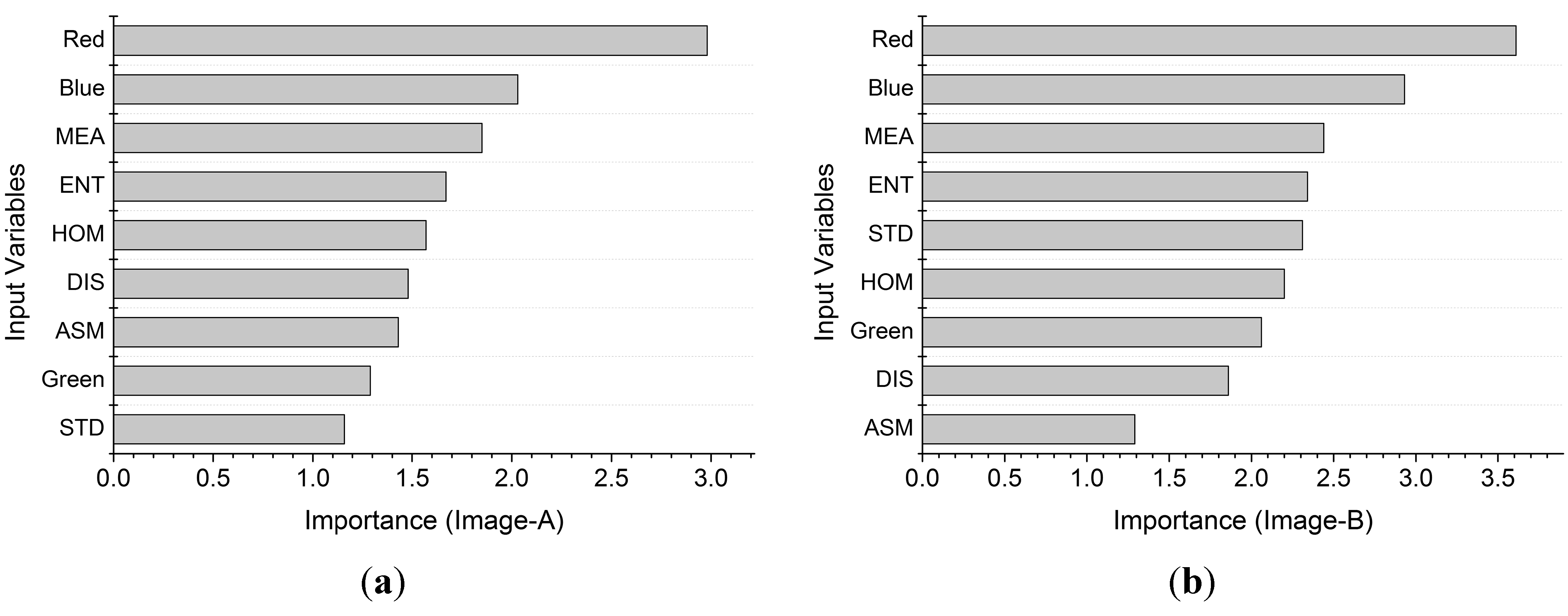
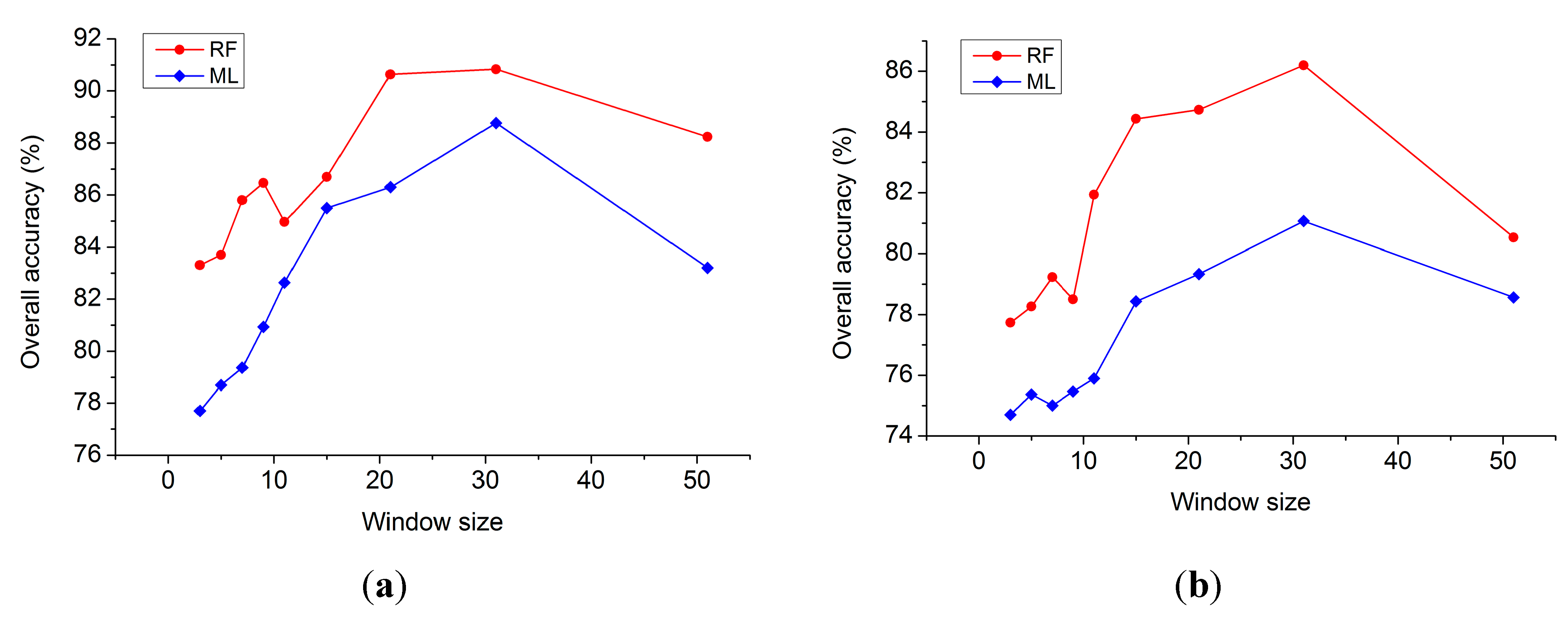
Unmanned aerial vehicle (UAV) remote sensing has great potential for vegetation mapping in complex urban landscapes due to the ultra-high resolution imagery acquired at low altitudes. Because of payload capacity restrictions, off-the-shelf digital cameras are widely used on medium and small sized UAVs. The limitation of low spectral resolution in digital cameras for vegetation mapping can be reduced by incorporating texture features and robust classifiers. Random Forest has been widely used in satellite remote sensing applications, but its usage in UAV image classification has not been well documented. The objectives of this paper were to propose a hybrid method using Random Forest and texture analysis to accurately differentiate land covers of urban vegetated areas, and analyze how classification accuracy changes with texture window size. Six least correlated second-order texture measures were calculated at nine different window sizes and added to original Red-Green-Blue (RGB) images as ancillary data. A Random Forest classifier consisting of 200 decision trees was used for classification in the spectral-textural feature space. Results indicated the following: (1) Random Forest outperformed traditional Maximum Likelihood classifier and showed similar performance to object-based image analysis in urban vegetation classification; (2) the inclusion of texture features improved classification accuracy significantly; (3) classification accuracy followed an inverted U relationship with texture window size. The results demonstrate that UAV provides an efficient and ideal platform for urban vegetation mapping. The hybrid method proposed in this paper shows good performance in differentiating urban vegetation mapping. The drawbacks of off-the-shelf digital cameras can be reduced by adopting Random Forest and texture analysis at the same time. View Full-Text
Keywords: UAV; vegetation mapping; urban landscape; random forest; texture analysis
▼ Figures
This is an open access article distributed under the Creative Commons Attribution License which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. (CC BY 4.0).
For further details log on website :
http://www.mdpi.com/2072-4292/7/1/1074









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
No comments:
Post a Comment